2022/06/20
◇「FOOMA JAPAN 2022(国際食品工業展)」視察_2022.06.07
会場: 東京ビッグサイト東展示棟1~8ホール
主催: 一般社団法人 日本食品機械工業会
開催規模: 出展社数:874社、総来場者数:92,717人(海外からの来場者395人)
開催期間:6月7日(火)~ 10日(金)の4日間
開催テーマ:「Restart FOOMA」

◇視察目的:
食品機械・装置および関連機器に関する最新技術ならびに業界情報など食品機械の最先端テクノロジー、製品、サービスの動向調査を目的に視察する。特に川上から川下全体の工程ごとに生産性の向上につながるトレンド、さらに生産現場におけるスマート化に向けた自動化技術の情報収集も行う。さらにAIやIoTなどのIT技術を活用した機械学習を基にした食品工場の将来像としては、自動化から自律化へ向かうであろう技術動向を探る。
◇全般的な展示内容:
省人化、自動化、無菌化、ロボットやAI、食の衛生管理など、食シーンの多様性に応える最先端の製品・技術・サービスを集結した総合展示会として3年ぶりに東京ビッグサイトでの開催である。
◇注目したメーカーの製品・システムについて紹介する。
本展では、主に次の3つのゾーンを視察した。Focus 1として「ロボット・IT・IoT・フードテック ゾーン」、Focus 2として「スタートアップ ゾーン」、Focus 3として「アカデミックプラザ2022 ゾーン」ごとにまとめる。
Focus 1:「ロボット・IT・IoT・フードテック ゾーン」
1. 株式会社アールティ
https://rt-net.jp/
注目製品:人型協働ロボット「Foodly(フードリー)」
2022年3月に食品工場の実生産ラインでの稼働にも成功している人型協働ロボット「Foodly(フードリー)」。”Work with Robot”な食品工場を想定してFoodlyを使ってライン生産、セル生産における協働ロボット導入の可能性をデモンストレーションで紹介していた。実際の協働作業を想定した食品工場における人手不足や衛生問題の課題解決の方法として、AIとロボットを掛け合わせたソリューションとして提案していた。

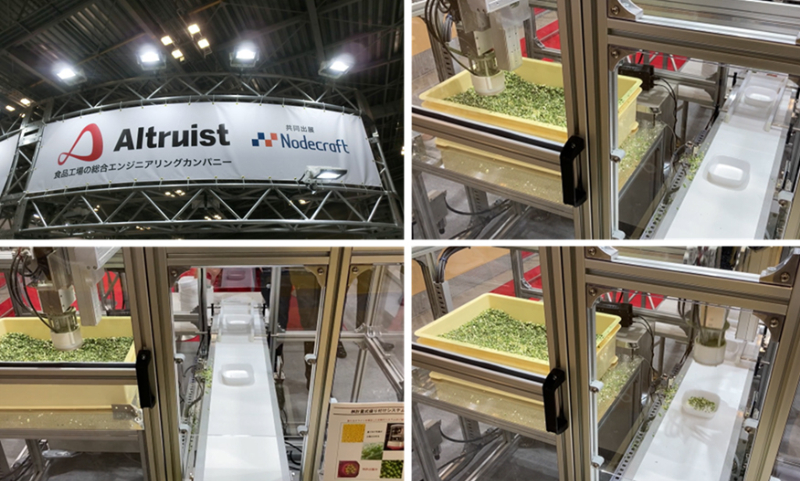
2. アルトリスト株式会社
http://www.altruist.co.jp
注目製品:「桝計量式盛り付けシステム」
桝計量式盛り付けシステムは、昨年リリースした「桝形計量ハンド」を盛り付けラインに組み込んだシステムである。桝形計量ハンドは、惣菜工場などにおいて最も人手を要する盛り付けラインでの使用を想定した手動タイプの省人化装置であったが自動化装置となっていた。従来、バラ物、コーンや豆といった粒物の盛付けは計量容器などと秤で作業者を介して行ってたが、デモ展示機では、それらを使用せずに定量計量できることを特長としている。分解・組立もワンタッチで可能で洗浄性にも優れている。また桝サイズを変えることで多品種対応も可能である。
3. THK株式会社
https://www.thk.com
注目製品:汎用ロボットハンド「ならいハンドシリーズ TNH」
食品素材で形状が不揃いな様々なワークの凹凸にシャフトをならわせてロックする“ならい機構”を採用することで、安定して吸着または把持が可能な汎用ロボットハンド。
コンパクトな設計で小型軽量、取付フランジはISO規格(ISO9409-1-50-4-M6)に対応しているため協働ロボットのハンドエフェクタとしての活用に期待される。

吸着エラーをカバーする絞り弁内蔵の「ならい吸着ハンド」、デジタル信号のみで開閉と把持力の制御が可能な「ならいグリップハンド」、用途に合わせてカスタマイズ可能な「ならいユニット」の3種類がラインナップされている。
4. 株式会社デンソーウエーブ
https://www.denso-wave.com/ja/
注目製品:高速人協働ロボット「COBOTTA PRO」
COBOTTA PROを使った「冷凍フライ投入システム」「高精度3Dビジョンを活用した不定形物・軟体物のピッキング」「AI模倣学習による液体原料の秤量」のデモ展示を行っていた。冷凍フライのピッキングからフライヤ投入までの作業のデモでは、蒸し暑いフライの製造現場では熱中症の危険性、高温の揚げ油による火傷など作業負荷軽減と安全につなげることを目的としている。
ピッキングのデモでは、これまでロボットには不向きとされていた不定形物・軟体物であるマッシュルームの収穫を3Dビジョンで認識し感圧センサ付きグリッパで優しくつかむデモも行っていた。今後の展開として惣菜製造工程で使用できるロボットとして注力することをアピールしていた。

5. 株式会社ニッタ
https://www.ckd.co.jp/
注目製品:ロボットハンド「SOFTmatics」
ロボットハンド「SOFTmatics」とロボットの自動工具交換装置「type S-C」を組み合わせたハンドのオートチェンジの実演デモを行っていた。不定形、バラバラ、つぶれやすいワークを優しくつまむ、包むように持つに対応した各種のハンドがラインナップされている。多品種の惣菜製造ラインでの活用など作業者による着脱が自動で行えるようになると各種の自動化製造ラインへの導入用途の拡大も期待できる。

6. ファナック株式会社 https://www.fanuc.co.jp/
注目製品:高速搬送システム「ゲンコツロボットDR – 3iB / 8L」
食品用のゲンコツロボット「DR – 3iB / 8L」による高速搬送システムのデモ展示がされていた。コンベヤから供給される生肉をカメラで見つけて、ソフトハンドが把持し、トレイに高速に整列する搬送システムとして提案していた。

ゲンコツロボットは、生鮮食品も扱える洗浄可能なロボット(IP67k)対応である。食品工場の場合、サニテーションの関係で機械装置そのものを直接洗浄するなど使用環境が非常に厳しいことから、食肉加工工程でのゲンコツロボットの導入が期待できる。
7. 株式会社安川電機
http://www.yaskawa.co.jp
注目製品:AI×ロボット「異物検査+除去アプリケーション」
AIによる異物や不良品の検知、食品仕様のロボットによるそれらの除去実現のデモを行っていた。デモ展示に組込まれていたロボットは安全性や衛生面を配慮した人協調ロボットMOTOMAN-HC10DTFP (サニタリ性向上タイプ)であった。さらに、検査結果を蓄積し統計化を可能とすることで、データを分析し各工程へフィードバックするアプケーションとしたことで生産ラインの改善がしやすくなるスマートファクトリ向けの提案されていた。
デモはカメラによる表面一方向の検査ラインとなっていたが、360°検査が可能な安価なアプリケーションを期待したい。

8. ユニバーサルロボット
https://www.universal-robots.com/ja/
注目製品:「コンベヤトラッキングを行う協働ロボット」
ロボット2台でコンベヤをトラッキング。1台目のロボットがトマト缶をピックアップし箱詰めし、2台目のロボットが箱に入ったトマト缶をコンベヤに戻すデモ展示を行っていた。デモ展示製品の特長として、ロボットに内蔵されたコンベヤトラッキング機能を活用するため、プログラミングが容易で、コンベヤのエンコーダへの追従性が高く、コンベヤの動きが変動する場合でも高速に応答でき、2つのグリッパはいずれも、ユニバーサルロボットと連動させるプログラミングが可能なUR+製品である。ロボットハンドは、SMC製マグネットグリッパで磁力を調整可能な磁石で吸着保持が可能。ASPINAシナノケンシ製電動3爪ロボットハンドは、3点把持のためセンターが安定するため円筒形状ワークの投入・取り出しに最適であることを特長として紹介していた。

9. 椿本チエイン
https://www.tsubakimoto.jp/
注目製品:「オートランバンガード MarkⅡ」
「オートランバンガード MarkⅡ」は、モノレール式の高速搬送システムである。天井空間を有効活用することで、作業者や地上設備にとらわれない最短ルートでの工程間搬送ができる。最大220m/分の高速走行で、コンベヤやAGVより高速な搬送も可能である。
ハンガ部分については、異物が落下しないなどの要求に沿った設計も可能なため、食品や医薬品といったクリーン度の要求の高い工場にも対応できる。この場合、制御方式は自己走行式で、給電方式は非接触給電を選択するとよい。位置認識方式も光学式リニア距離センサとバーコードラベルからの選択が可能である。最大搬送質量70kg、100kg、および200kgに対応するタイプを標準ラインナップしている。

10. 株式会社フジキカイ
https://www.fujikikai-inc.co.jp
注目製品:新型包装ラインシステム「Fuji Smart Module」
個包装から、ケーサー・パレタイザーまでの包装工程をフレームに納め、統一感のあるラインを一気通貫できるようにコンパクトにシステム化していた。同じ形状のフレーム内にロボット・包装機を組み込んだラインシステムで省スペース・省人化、生産性の向上、安全・安心が実現できるとアピールしていた。

11. ストーブリ株式会社
https://www.staubli.com/ja-jp/
注目製品:「ストーブリ独自の完全防水ロボットHE」
デモ展示のしていた完全防水ロボットHEは、ロボット本体の衛生性維持を図ることを目的に洗浄しやすい設計が特長である。各軸には異物が入り込みやすい隙間がなく、シール付きの特殊ネジが必要最低限で組み立てられている。

また食品工場で採用頻度が高い洗浄剤で洗浄耐久性テストを実施していて、長期使用の信頼性も高い。ブースでは透明密閉槽内で防水性を実感できるよう洗浄機でロボット本体を洗浄するデモンストレーションも行っていた。
12. オークラ輸送機株式会社
https://www.okurayusoki.co.jp/
注目製品:ステンレス製コンベヤ「ジャブコンⅡ」
「ジャブコンⅡシリーズ」はステンレス製の食品搬送用のベルトコンベヤである。デモでは‟清潔仕様”をコンセプトに、食品搬送に最適な機種を数多く取り揃え、HACCP環境にマッチした搬送ラインを自在に構築できることをアピールしていた。ロボットとジャブコンⅡを組み合わせた未包装品の冷凍ハンバーグのコンテナ詰めラインをデモ出展し、整列搬送させるラインを実演していた。さらに高速転換機や段積み・段バラシ装置を組み込んだコンテナ自動搬送ラインも注目である。また包装品ラインとしてアルミコンベヤ「ベルコンミニⅢ」で構成するピロー包装されたアメの搬送ラインが上下反転・分岐・合流装置など組込んだラインデモも実演していた。

Focus 2:「スタートアップ ゾーン」
今年新設されたスタートアップゾーンで18社が出展。同ゾーンは新たなビジネスの成長を目指す設立9年以内の企業が対象で、出展製品は既に商品化されている製品、あるいは今後3年以内に商用化が見込まれている製品が対象となって紹介していた。注目した企業・製品について取上げる。
1. 株式会社Closer
https://close-r.com/
注目製品:「生産ライン省人化小型ロボットシステム」
食品生産ラインの省人化に最適化された、小型・簡単操作・高拡張で導入・運用がしやすいをコンセプトにしたロボットシステムである。小型移動式ロボットシステムにより、少ないスペースにも導入が可能。また、洗練されたユーザーインターフェースにより、難しい知識や訓練を必要とせず運用することもできる。そして、様々なロボットアームに対応したロボットコントローラにより多様な商品に対応することができるとアピールしていた。

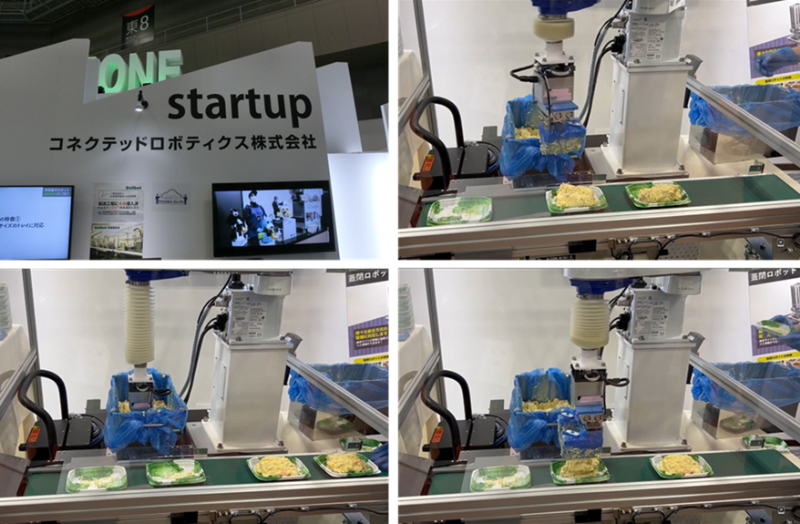
2. コネクテッドロボティクス株式会社
https://connected-robotics.com/
注目製品:「盛付ロボット」
野菜などの不定形物や粘着性の高いポテトサラダのような食材をロボットが扱う惣菜盛り付けロボットのデモ展示を行っていた。少量多品種で、曜日や時間帯によって段取り替えが多い惣菜製造工場では自動化が進んでいない製造現場向けとして提案していた。
このロボットは、決められた重量の食材や具材をつかんで、製品トレイに盛り付ける作業工程を自動化することができ、また惣菜製造工場の大幅な建て替えなどを行わずに、既存の製造工程ラインに導入することが可能であると紹介していた。
店舗向けロボットシステムでは各種の実績を持っている。惣菜盛り付けロボット、蓋閉ロボット、AI検査ウェアなど今後の展開として食品工場向けにも販路を広げていくことを目指していると説明を受けた。ロボットハンドに関するソフトウェアとハードウェアの強みを活かし食品分野のDX・自動化のサポートにも注力していくようだ。
3. 株式会社Finger Vision
https://www.fingervision.jp/
注目製品:「食材ピック&プレース向け触覚センサ付きロボットシステム」
触覚センサ付きロボットシステムは食品工場における不定形食材の盛り付けタスクを自動化するためのロボットシステムであり、触覚センサ、協働ロボット、周辺機器等により構成されている。
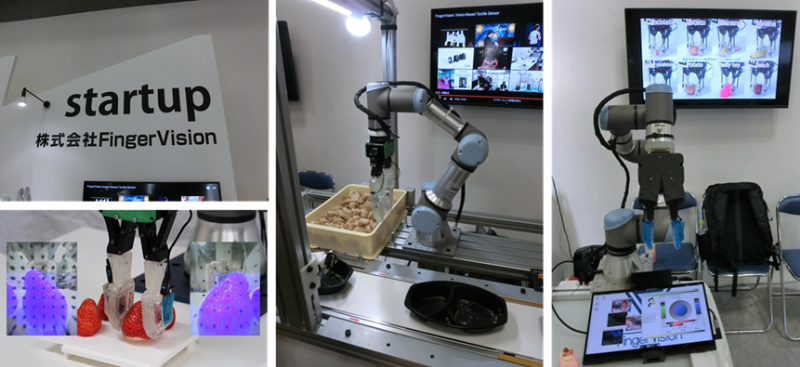
番重内に山積みにされた食材をカメラで認識し、持ち上げて盛り付けを行う際に触覚情報を活用するため、高い把持成功率を実現することができると紹介していた。
4. 株式会社ロビット
https://robit.co.jp/
注目製品:AI自動カットソリューション「CUTR(カトル)」
食品原材料など不定形物のカット系加工の自動化ソリューション「CUTR(カトル)」を披露。デモ展示機ではレタスの芯を除去する実演を行った。
CUTRでは、AIが茎の切断面や葉脈の位置、葉の膨らみ具合などの外観から内部にある芯の位置や姿勢を推定してロボットの動作を決定する。熟練労働者なら芯の除去に1個7秒かかるが、CUTRは5秒で加工できると試算している。歩留まりも熟練労働者と同等という。AIの閾値調整もでき、切り抜く不可食部の増減も可能となっている。
カット機構も自社開発しており、個々の加工対象に合わせて刃を入れる角度を変え、カットする範囲や位置を変えることができることをアピールしていた。

Focus 3:「アカデミックプラザ2022 ゾーン」
各大学、研究機関の最先端研究において実用化に向け注目した技術について取上げる。
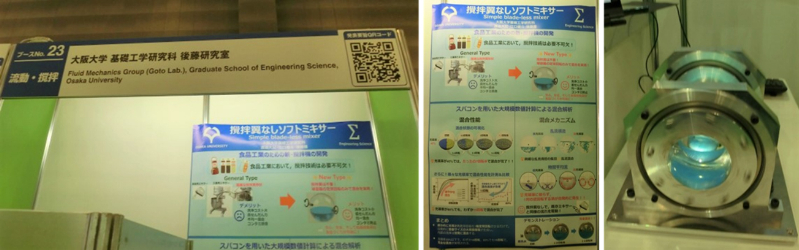
1. 大阪大学 基礎工学研究科 後藤研究室
https://fm.me.es.osaka-u.ac.jp/
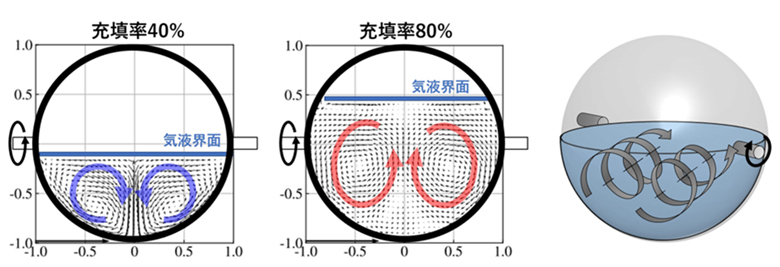
「撹拌翼なしソフトミキサー」
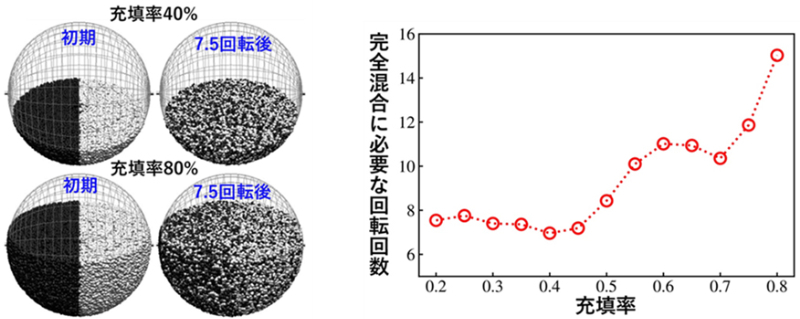
図3-1-1.に示すこの機構は極めて単純で,部分的に充填された容器を水平軸まわりに1軸定常回転させる機構により、回転軸と垂直な軸を持つ、1対の大規模な渦構造(ねじれ流)が発現するものである。このねじれ流により、内部には複雑な流れが発生し,容器内部の均一混合を迅速に実現することを可能する技術として紹介していた。図3-1-2.スパコンを用いた流体シミュレーションによれば、充填率50%以下において、およそ、8回転程度で内部の流体は均一に混合される。また,充填率が80%という比較的充填率が高い状態においても,15回転ほどで混合が実現される解析結果が示されていた。
また、このねじれ流は球容器のみではなく、円筒容器でも発現することが確認されており、本技術は様々な場面での応用が期待できる。今後、容器形状や回転速度、液物性等のパラメータスタディが蓄積されると用途に応じた最適な撹拌・混合方法が確立できれば、実機への応用も期待できる。
2. 徳島大学 ポストLEDフォトニクス研究所
https://www.pled.tokushima-u.ac.jp/
「食品ロスゼロ社会を目指す光異物検査技術」
本研究は、偏光の概念を導入し、近赤外光と偏光による食品中の異物検知として、近赤外の発光波長を有する発光ダイオード(LED)と、この光を制御が可能な偏光子を用いた検査技術として開発された。また、画像処理を駆使し、本技術で検知した異物を可視化できるように応用している。
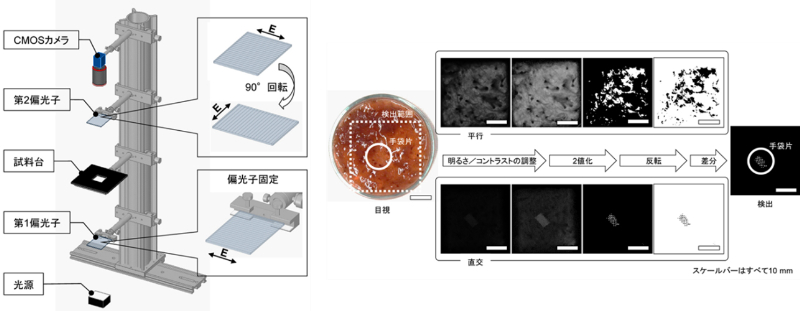
図3-2.(左)は、近赤外光と偏光による異物検知の透過光学系と、偏光操作の原理を示している。近赤外光は、食品と水の光吸収の小さい波長を光源とし、これに感度を持つCMOSカメラと2枚の偏光子で試料台を挟む構成。光源からの検査光を試料に照射し、試料を透過した光をカメラで受光、撮影した画像データを解析する事例と、図3-2.(右)は、苺ジャムに混入したビニール手袋片の撮像と検査画像の解析結果が示めされていた。目視像では混入した手袋片を確認できないという結果に対して偏光子を平行配置した透過光像より、果肉や種粒と手袋片の光吸収量の差から透過光量が変化し、手袋片を確認できる事例が紹介されていた。
3. 京都大学 化学工学専攻分離工学分野 食品生物科学専攻農産製造学分野
https://www.food.kais.kyoto-u.ac.jp/ja/
「スマート大豆食品の開発~ユーザーフィットなあたらしい食品開発」
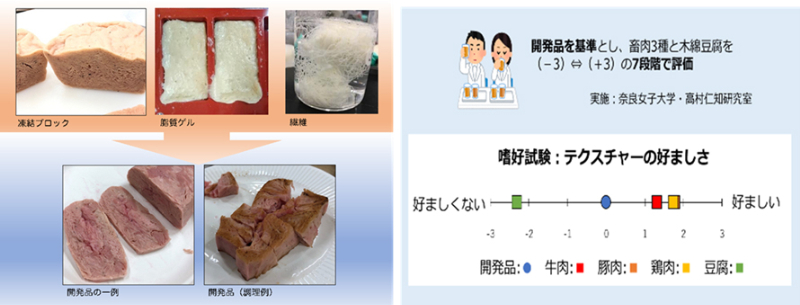
本研究開発では,これまでに上市されている代替肉製品には見ることのない,数センチサイズのブロック状,種々の栄養素(油脂,ミネラル,機能性成分など)を任意に添加できるユーザーフィットな肉様のテクスチャーを持つ大豆原料食品の製造加工法を紹介していた。
製法は,大豆粉末,油脂,アルギン酸ナトリウムを主成分とするスラリーから,繊維状構造体,ブロック状構造体を作製し,これらの組み合わせによって肉様の組織構造を模す加工技術の組み合わせによる紡糸プロセスと凍結プロセスの適用を大きな特徴としている。開発品は畜肉に近い硬さ,ジューシー感,食感を備えており,様々な調理に適用できる形態であることも注目である。図3-3.に開発品と官能評価の比較を示す。
4. 日本大学 生産工学部 五十部研究室(マネジメント工学科) 小林(奈)研究室(教養・基礎科学系)
http://www.ka.cit.nihon-u.ac.jp/staff/isobe/
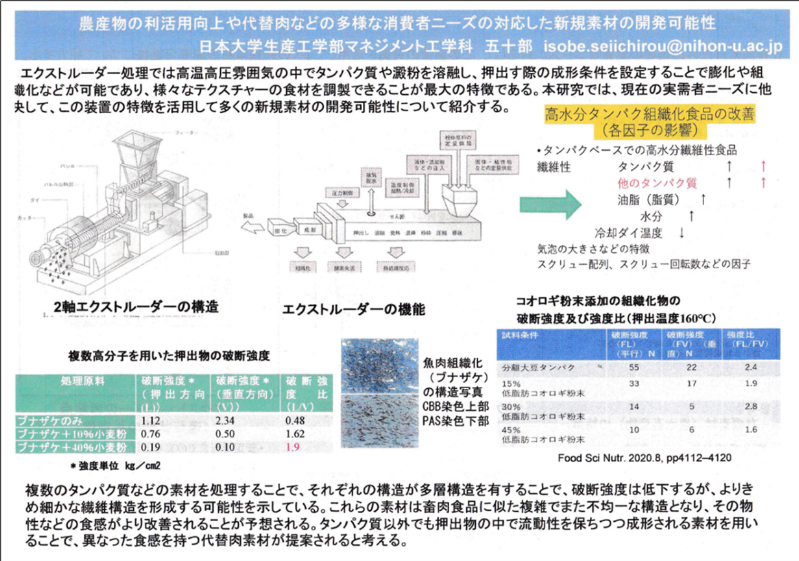
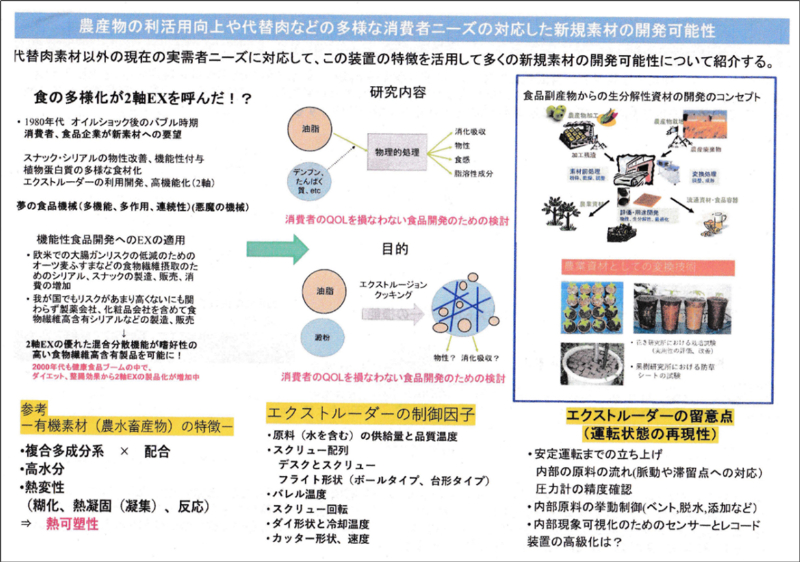
「代替肉などの新規素材ニーズ及び農産資源の利活用のためのエクストルージョンクッキングによる高付加価値製品の開発可能性」
エクストルージョンクッキングの新たな利用法としてデンプンや脂質の複合体の素材で食べても太らないダイエット素材的な食品の可能性について図3-4-1.に示す素材開発の考え方を紹介していた。
さらに植物性組織化たんぱく質(図3-4-2.に組織構造を示す)などの代替肉だけでなく、農産物の利活用向上や多様な消費者ニーズの対応した新規素材の開発可能性と、主にエクストルージョンクッキング技術の活用による高付加価値食品開発についての提案がされていた。
5. 立命館大学 理工学部 ロボティクス学科 ソフトロボティクス研究室
http://www.ritsumei.ac.jp/~hirai/)
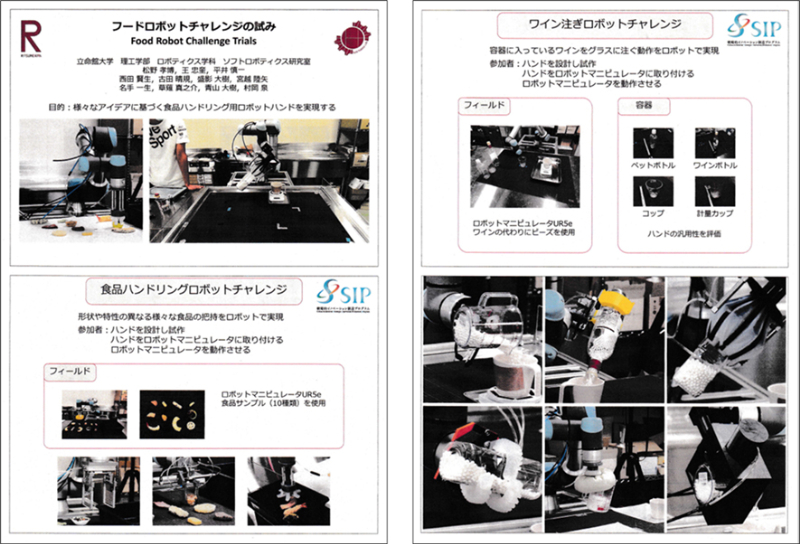
「フードロボットチャレンジの試み」

多様な食品をハンドリングするためには,様々なアイデアに基づくロボットハンドが必要になるため、フードロボットチャレンジを通して食品ハンドリング用ロボットハンドの研究を行っている。アイデア抽出のためには,食品ハンドリングに関する研究コミュニティを拡大することが望まれ、第一歩として研究室内でロボットチャレンジに取組んでいると説明を受けた。
ブースでは,ロボットチャレンジに関するこれまでの試みを紹介していた。一つは食品ハンドリングチャレンジで形状や特性の異なる様々な食品サンプルを把持するハンド。もう一つがワイン注ぎチャレンジで,容器に入っているワインをグラスに注ぐ動作を,ロボットに実行させるハンドの取組み(写真3-5-2.)。
最後に
3年ぶりに東京ビッグサイトでの開催ということもあり、非常に盛況であった。特に今回視察した東ホール7・8展示会場は現在注目されているフードテックに関連した出展が多かった。3つのカテゴリーをFocus1 ~ Focus3としてまとめた。
近年の新しいモノづくりは、テクノロジーだけではつくれない。その基になるサイエンス、科学的な知見が必要となる。スタートアップ企業、研究機関や大学などの取組みなどを本展で、じっくりと視察してサイエンス(科学)とテクノロジー(技術)の両輪を上手に融合することが求められていると感じた。
また、各種業種において仕事の80%はAIやロボットで代替できるという論文発表があって日も浅いが、特に食の分野にもAIやロボットがどんどん導入されてきていることから、先ずはボトルネックとなっている製造ラインの検査工程でAI技術が積極的に活用され始めている。ただし360°全方向、内部および成分などの異常が見れるようになって初めて“AI自動検査装置の自動化であり、その先の自律化”につながると考える。
以上
【参考引用先】
1. FOOMA JAPAN 2022 公式WEBサイト https://www.foomajapan.jp/
2. 展示会ブース360°バーチャルツアー https://www.foomajapan.jp/360tour/
3. 各社・研究機関・大学HPレポート内URL参照