2021/09/13
『食品分野など活用が期待されている力覚センサ』
Force sensor that is expected to be used in the food field, etc.
1. 力覚センサとは
力覚センサは、力やモーメントの大きさと向きを測定する装置になる。6軸型が基本で、力とモーメントをそれぞれx、y、z方向の値を測定する。
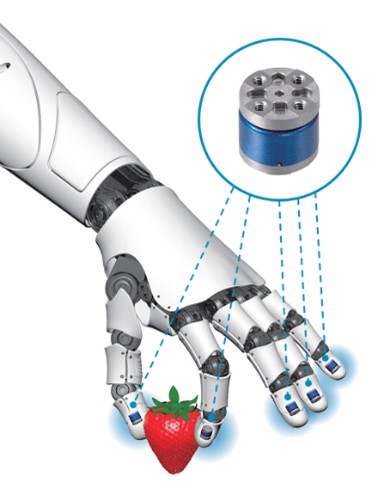
使用用途によっては、3軸型の力覚センサもある。力覚センサは、測定対象の変形の大きさや向きを利用して測定する。変形の検出方法としては、ひずみゲージ式、電圧式、光学式、静電容量式などがある。図⒈はロボットハンドのエイドエフェクタ活用例 (出典:ミネベアミツミ(株)H.P)
2. 力覚センサの原理
力覚センサは、力によって生じる測定対象の変形を利用して力やモーメントを検出する。変形の測定方法としては、ひずみや変位量、特性変化を用いる。
力覚センサは測定方法によって分類でき、その中でも代表的なひずみゲージ式、圧電式、光学式、静電容量式の動作原理について概説する。
① ひずみゲージ式力覚センサ
測定対象が引張や圧縮の力を受けてひずむ時のひずみを検出し、測定対象のゲージ率と組み合わせて測定対象に加わった力を測定する。
② 圧電式力覚センサ
力覚センサ内に内蔵されている水晶が力を受けることによって電子を放出する。その電子の量を測定することで力の大きさを検出する。測定対象との接触性に気を付ける必要がある。
③ 光学式力覚センサ
光学式力覚センサは、測定対象に設置した模様の変化をカメラやレーザを用いて測定し、測定対象のゲージ率などを分析することで力やモーメントを測定する。非接触で使用できることが特徴である。
④ 静電容量式力覚センサ
静電容量式力覚センサは2枚の平行平板に力が加わり、平行平板間の距離が変化することにより生じる静電量変化を測定することで力を検出する。構成が容易なことが特徴である。
3. 力覚センサの使用用途
力覚センサは、産業用ロボットで主に使用されている。
力覚センサを使用する環境に応じて、精度や応答時間、力やモーメントの検出範囲、耐久性を考慮して選定する必要がある。
力覚センサの使用用途として、次の4つがある。
① 組み立て工程でのはめ合い作業をするロボットの力の検出
② 遠隔操作型の医療用手術ロボットにおける、ロボット側と操作側両方の力の検出
③ 2足歩行ロボットの自立制御用の力の検出
④ 食品などの個体差のある柔らかいあるいは傷付きやすいものに対する力の検出
4. 期待されている活用例
力覚センサは、力やモーメントを同時にリアルタイムに検出することができるセンサである。力覚センサは、ロボットの末端部分に取り付けて、外力や反力を検出できる。
力覚センサが搭載されたロボットを人がハンドリングすることによって、人とロボットの協調作業を実現することができる。また、力覚センサを用いることによって、微小な力加減を必要とする細かな作業を実現できるようになる。特に製造現場では、今までは熟練の職人でしかできないような難しかった精度が求められる作業を、力覚センサを用いることによって作業の自動化を実現し、生産性を向上させている。
食品分野では、例えば軟らかい食材(惣菜、パン、青果など)のピッキングやお弁当トッピング作業など把持力が食材ごとに異なる作業や医療分野における、患部の状態を把握するための触覚診断などのような遠隔診療に力覚センサの活用が期待されている。
次の2つの力覚センサの活用が進んでいる。
① HDR力覚センサの活用
HDR(ハイダイナミックレンジ)力覚センサというものがある。HDR力覚センサは、10gから20kgまでの広範囲の力のダイナミックレンジを備えている。
AIとロボット技術にHDR力覚センサを組み合わせることによって、微小な力を調整しながら細かい組み立て作業の実現ができる。また、生産現場では製品の組み立て作業の完了をクリック動作で検知することができることから、ロボットによる組み立て作業の高度化が期待されている。
② 静電容量型力覚センサの活用
力覚センサの中には、静電容量型力覚センサと呼ばれるタイプの力覚センサがある。
この力覚センサの特徴は、2組の並行平板(電極)を用いて6軸成分を検出することができる点である。これによって、シンプルな構造を実現することができ、かつ価格を安価に抑えることができる。また、過負荷対策ストッパー機構がセンサ内部に搭載されているものもあり、過負荷で破壊されることを防ぐことができる。
5. 力覚センサの国内外主要メーカー
国内外の主な力覚センサメーカーH.P URLを以下にまとめる。
① 三菱電機株式会社
https://www.mitsubishielectric.co.jp/fa/products/rbt/robot/pmerit/option/sensor/spec.html② セイコーエプソン株式会社
https://www.epson.jp/products/robots/force/③ 株式会社ワコーテック
https://wacoh-tech.com/products/mudynpick/maf-3.html④ 株式会社レプトリノ
https://www.leptrino.co.jp/product/6axis-force-sensor⑤ 株式会社テック技販
http://www.tecgihan.co.jp/products/category/sensor-amplifier-measuring-device/⑥ 株式会社サンエテック
http://www.san-e.co.jp/products/index_15.html⑦ 日本リニアックス株式会社
http://www.liniax.co.jp/products/tfsa.html⑧ ビー・エル・オートテック株式会社
https://www.bl-autotec.co.jp/products/index.php?cid=5⑨ シュンク・ジャパン株式会社
http://schunkjapan.jp/robotaccessory_ftsensor.html⑩ ミネベアミツミ株式会社
https://pr.minebeamitsumi.com/6axisforce/⑪ Ohmite Manufacturing Company
https://www.ohmite.com/fsr-series/⑫ Honeywell International Inc.
https://sps.honeywell.com/jp/ja/products/sensing-and-iot/sensors/force-sensors⑬ ATI Industrial Automation, Inc.
https://www.ati-ia.com/ja-JP/products/ft/ft_ModelListing.aspx最後に、
今後、各種の製造業では自動化が進んでいくと考えられることから、産業用ロボット分野、特に食品や医療での活用でますます需要が伸びていくことが予想され、人と同じような力加減を代替えする技術へ展開されることを期待する。
以上