2020/02/17
◇「ロボデックス展」同時開催「スマート工場EXPO展」視察_2020.02.14
会場:東京ビッグサイト西1~4ホール、主催:リード エグジビジョン ジャパン(株)
開催期間:2020年2月12日~14日の3日間

視察目的:
ロボデックスでは、ロボットハンド、グリッパおよびチッキングなどロボットの把持に関する製品、ロボット導入支援ソリューションを視察、さらにスマート工場EXPOでは食品・飲料工場向けソリューション、遠隔支援ツールなどを視察する。
全般的な展示内容:
ロボデックスの展示会場は、全体の出展社数が270社で内訳は産業用ロボットエリアが110社、開発技術エリア130社、サービスロボットゾーン30社と自動化や人手不足対策に貢献するロボット技術と支援技術の展示がされていた。
同時開催のスマート工場EXPOも300社がIoTソリューションやAI、FA機器・装置とロボットおよびスマート物流・搬送などが展示されていた。
◇注目したメーカーの製品・システムについて紹介する。
【ロボデックス展】
ロボットを用いた自動化設備において主要な要素技術のロボットエンドエフェクタであるロボットハンド、グリッパメーカーを主に視察し、搬送装置などのロボット化で注目するメーカーについてレポートする。
1.伊藤忠マシンテクノス株式会社 https://www.itcmt.co.jp/
Soft Robotics社ソフトロボットハンドのサニタリモデル(写真⒈)が展示紹介されていた。多くの汚れが付着する食品加工現場に対応すべく、食品との接触部分の機械部品を極力取り除いた高洗浄モデルとなっている。
Soft Robotics社(http://www.softroboticsinc.com)は、高性能、高グリップ性、高洗浄性を実現したソフトロボットハンドを開発している。
従来のロボットハンドでは実現できなかった、不定形で表面に凹凸のある食品・製品のハンドリングが可能としている。エアーの圧力と吸気のパラメーターを専用コントローラーで制御し、ミリセカンドの高速で微細な把持力の調整を可能にしている。これまで自動化には限界があった食品用・産業用アプリケーションに用いられている。今回はロボットに装着されていない状態で展示されていた写真⒈のハンドは把持サイズが1mm~90mmが展示されていた。その他のラインナップは、把持サイズが40mm~95mmと50mm~90mmを揃えている。
Soft Robotics社のソフトロボットハンドは米国、日本において特許を取得済みである。伊藤忠マシンテクノスはSoft Robotics社の正規代理店となっている。
同ブース内にドイツ製モノレール式搬送システム「モントラック」が展示されていた。
搬送シャトルとモジュール式レールがコンポーネントされる方式に注目した。
2.シナノケンシ株式会社 www.shinanokenshi.com/
ステッピングモータとサーボ制御を組み合わせて”異型物を柔軟に把持できる機能”を実現した「電動ロボットハンド」(写真2.)を紹介していた。
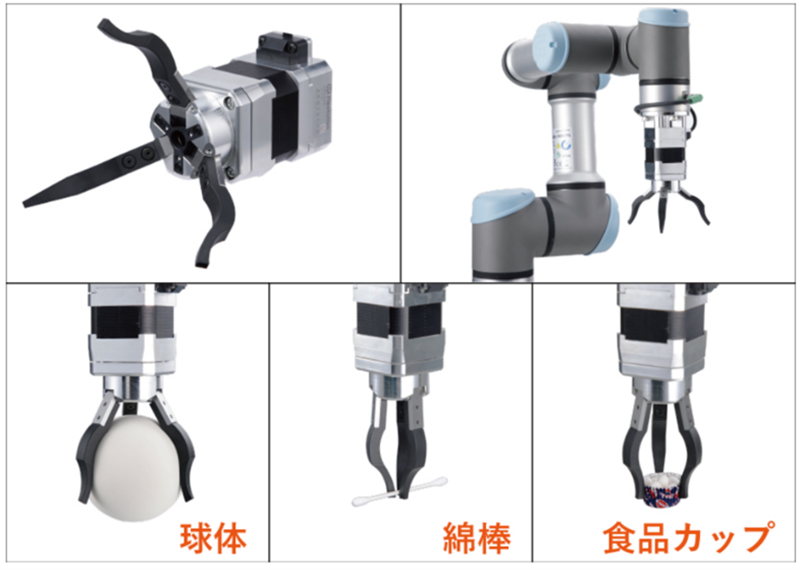
特殊カム構造により広い開閉幅を実現している。爪を交換することもできるので一台で様々な大きさ、形状の物をつかむことが可能になっている。
ハンドは中空構造になっており小型カメラや照明を通すなど付加機能を取り付け作業の幅を広げることも可能となっている。
展示ではスカラー型のロボットとパラレルリンクロボットのデモ展示を行っていた。
3.株式会社北川鉄工所 https://www.kiw.co.jp/
北川鉄工所は、旋盤に用いる3爪や4爪チャッキングのメーカーで、近年そのチャッキングの技術を応用してロボットハンド(写真3.)の新製品展開を図っている。特に多品種少量生産のロボット活用をサポートするものとして、次のような特徴を持っている。
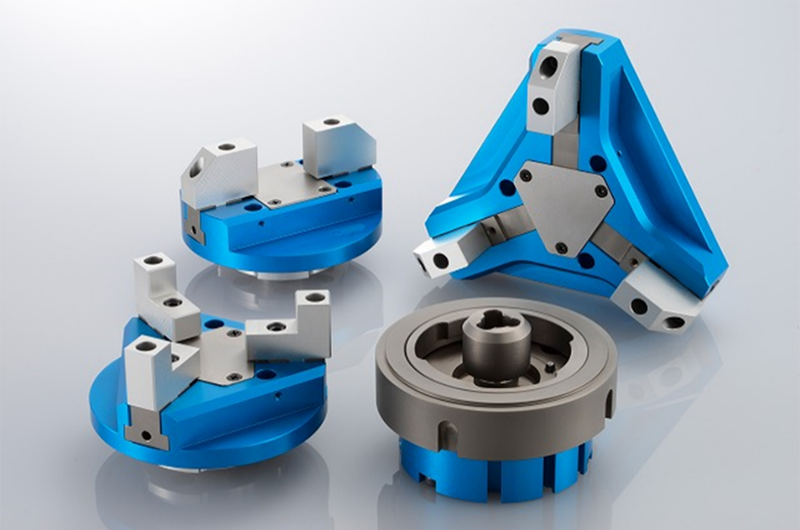
① 軽量交換部品の簡単迅速交換でワーク変更に対応
② 新規ワークの立ち上げ時間の短縮
③ 交換部品数減少によるコスト削減
④ マニュアル交換によりティーチングポイントを最小限に抑えることが可能
現在は一般産業向けに特化しているが、今後は他の分野(三品産業向けなど)への展開を考えているようである。
4.日本電計株式会社 https://www.n-denkei.co.jp/
(共同出展:ダブル技研株式会社)
圧力センサレスで均一な接触圧で把持動作を行い、人体に近い自然な指先の太さや形状を実現。人体における動力源である【腱】をリンク機構で再現し、全ての関節を一連の連動リンクととしている。
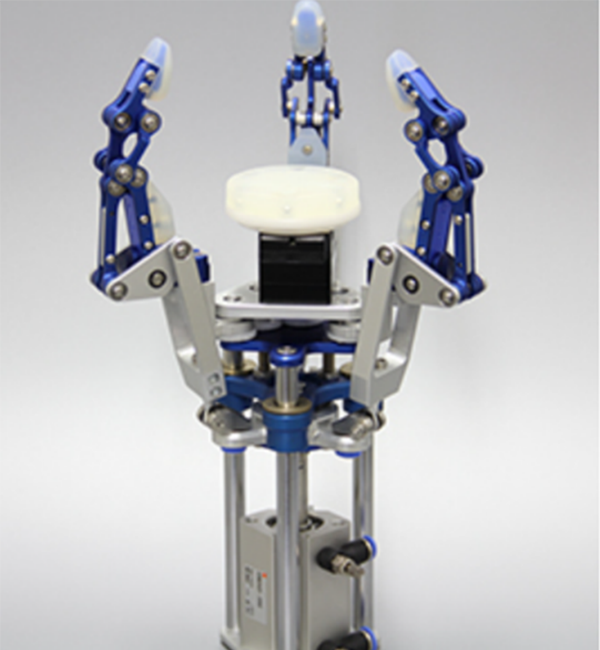
1個のアクチュエータによる1入力で対象となる物体形状に沿って均一な把持力を持たせ、把持動作が可能なロボットハンドである。対象ワークの特性に左右されることなく、より安定した把持動作が可能で汎用性を持つマルチ・ロボットハンドはダブル技研製(写真4.)など多種ハンドを紹介していた。
またロボットの視覚となるD-Visionは、赤外線方式の距離センサを搭載した3次元計測カメラwである。このカメラを使用して2D情報に距離情報を付加した独自のアルゴリズムから構成された画像システムを用いることで距離センサなどを別途、設置する必要がなく省スペースな画像システムを実現できることを強調していた。
ロボットハンドは、2指型~5指型までの各種ラインナップが多く展示されていた。
5.PSi株式会社 http://psi-inc.jp/
PSiは、ロボット用電動グリッパのメーカーであるが、ロボット組込み型のグリッパ(写真5.)の紹介をしていた。

次の4つを特徴とするものである。
① 軽量化により、ロボットの高速化・小型化が可能
② 小型化により、ロボットの自由度・軸精度がアップ
③ 低慣性カム構造により、高精度・高速タクトを実現
④ 本体を4軸同時使用が可能
としている。
その他にスカラーロボット用途の揺動グリッパや多関節ロボット用途のグリッパ+フィンガの組み合わせハンドの紹介がされていた。
6.株式会社妙徳 https://www.convum.co.jp/
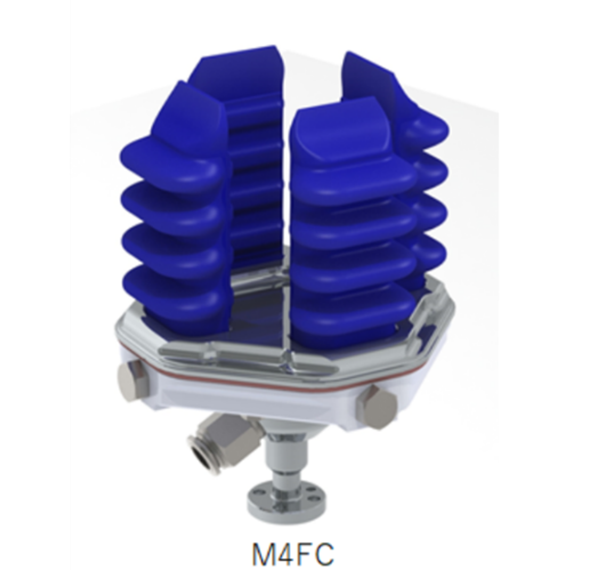
妙徳は、真空パッドメーカーであるが、真空パッドを組み込んだハンドキッドをロボットエンドエフェクタとしてラインナップ展示していた。 特に真空パッドに特徴がある。星型パウチフィルム吸着用パッドPMシリーズ(写真⒍左)やバルーンハンドSGBシリーズ(写真⒍右)は興味深い。

星型パウチフィルム吸着用パッドPMシリーズは、星型のリップ形状が軟体や袋形状のワークを自在に追従しすることが特徴である。使用素材はFDA適合、シリコーンの他に金属配合シリコーンもラインバップしているため食品分野での使用が可能である。 異物吸い込み防止用メッシュフィルタ内蔵タイプもラインナップしていて、リップを薄くせず、耐久性と追従性を両立させた形状となっていることが紹介されていた。

また、半導体工場のシリコンウエハー搬送に用いられている要素技術の非接触搬送用パッドCOPシリーズ(写真⒎)を紹介していた。ベルヌーイの定理により、ワークを非接触で搬送できワークに吸着跡、ダメージを与えることなく搬送できることから、軽量な食材の搬送に利用できる。搬送物の重量は13.5~230gの範囲で5種類のパッドをラインナップしている。
7.株式会社フジキカイ http://www.fujikikai-inc.co.jp/
最新の多列自動ピッキングロボットシステムをデモ展示(写真8.)していた。機器構成は、多列自動ピッキング装置new TLM-α2+搬送コンベアFSトランスファー+包装機α wrapper 8を直列に配置してワーク(食材:クラッカー)を連続ピッキングするシステム展示で、ピッキング装置の入口で3Dスキャナーによって検品し良品をアーム型ロボットでピッキングして包装工程へ供給するシステムとなっていた。従来のピッキングで用いられているパラレルリンクと異なり、1フレームに3つのアームを設置することで高速ピッキング処理の向上が図られている。ロボットの駆動部分がワークの頭上に設置されているため、異物の落下防止の対策を講じれば、さらに安全性を加味したシステムになると感じる。

8.株式会社CNK http://cnk.co.jp/
ロボットアーム付搬送システム(写真9.)と天井搬送システム(写真10.)のデモ展示をしていた。

ロボット付搬送システムはガントリーローダで現行の作業で例えば、上からしか投入できない作業、ワーク姿勢が限定され、直線ライン限定や高所作業などでの対応を狙うシステムである。
天井搬送システムは、天井面を有効に使ってワークなどを搬送するシステムとして展示していた。天井板を挟んでマグネットによるリニア駆動のため動きには自由度があるが、搬送スピードに制約があり遅いこと、温度上昇などによる磁力低下や搭載重量が大きくないことから開発段階といえる。

昇降シリンダを吊り下げた展示には搬送ワークが食品(握りすし)であったが異物混入やサニタリ性においては課題が残るが、今後に期待したい。
9.株式会社シンテック http://www.shintec-n.co.jp/
シンテックは主に自動車、工作機械メーカー向けに専用装置(加工機、搬送装置、組立装置)手がけていたが、そこで培った技術をロボットシステム事業として展開している。
デモ展示では、協働型双腕ロボットduAro、6軸多関節ロボットRS005Lを生産ラインに組み込んだお弁当蓋閉め装置を提案していた。
特にduAroに関しては「人」と「ロボット」の共存、協調をキーワードに開発されたロボットで、従来のロボットに比べ、安全柵が不要で尚且つ、ロボットのプログラムが他に比べて分かりやすく、「ロボットは入れたいが、導入ハードルが高い」と感じている企業でも可能性を感じて頂けるロボットになるはずと説明員が強調していた。
10.東京都立産業技術センター https://tiri-robot.jp
サービスロボットゾーンの協働双腕ロボット組み込みシステムとして「ハンバーガー調理支援ロボットシステム(バンズの焼成工程)株式会社ショウワ」(写真11.)のデモ展示がされていた。
コンセプトは、「人とロボットが協働するファーストフード店を実現したい!」
ターゲットは、ハンバーガー、サンドイッチ、ピザ調理支援
デモ展示の作業工程は、次のような順で行っていた。
① ハンバーガーのバンズ・ペーパーをストッカーに保管
② 双腕の一方のハンドA(写真左)でストッカーを開閉
③ もう一方のハンドB(写真右)でバンズ・ペーパーを吸着搬送
④ 次に双腕の一方のハンドAでバンズストッカーを開閉
⑤ もう一方のハンドBでバンズを吸着搬送
⑥ バンズを投入シューターに投入して横型トースター(コンベア代用)で自動焼成
⑦ 横型トースター(コンベア代用)で焼成送り
⑧ 末端で位置決め後、ハンドBでバンズを吸着
⑨ 自工程のトッピング位置へ搬送
までの作業工程の展示となっていた。具材のトッピング、包装となる工程のデモはなし。

バーガーは焼くだけでなく蒸す場合もあるので用途別に検討が必要となる。また、ロボットの搬送スピードと人との協調において少し課題があるように感じる。将来的にトッピングまで考えると個別最適でなく全体最適化を図りながらシステム構築する必要性がある。
11.ヤマハ発動機株式会社 https://www.yamaha-motor.co.jp/
単軸型ロボットや直行型ロボット、スカラーロボット、垂直多関節ロボットなどのアプリケーションが展示紹介されていた。今回注目したのは搬送工程に用いるリニアコンベアモジュール LCM100(図⒈)である。生産ライン作業で問題となる、タクトタイム、段取り替え、コンベア上での制約から作業に支障があるサイクルタイムの異なる作業の場合、遅い作業に合わせるため作業時間にロスや滞留を生じる。それらの問題を解決する方法として「流す」から「動かす」をコンセプトに高速・高精度搬送システムとしてデモ展示していた。
このシステムを導入するメリットとして強調していたことは、次の点である。
① 搬送ラインのタクトタイムの短縮
② スループットの向上
③ 優れたメンテナンス性
④ 搬送ラインの省スペース化
⑤ 自由度の高いライン設計
⑥ スピーディな立ち上げ
⑦ ランニングコスト削減
⑧ 長寿命 など
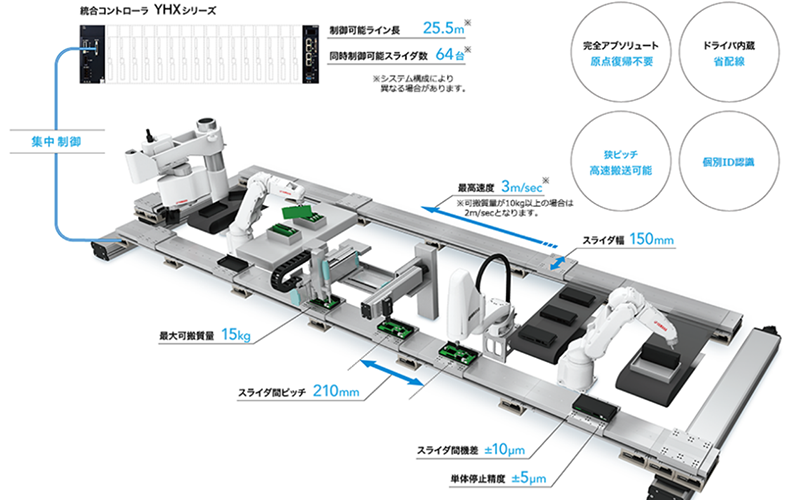
ヤマハ発動機のリニアコンベアの使い勝手を考えると今後のトレンドとして搬送装置のロボット化が本格化するのではないか感じる。
12.オザック精工株式会社 https://www.ozak.co.jp/
リニアガイドを使わないロボット&パレット搬送モジュールのデモ展示があり、ワイヤレス搬送のシステム(写真12.)を紹介していた。垂直多関節型ロボットを搭載してロボット自身が走行する搬送装置のロボット化システムである。

ワイヤレス搬送システムでは、次のことをメリットとして挙げていた。
① ロボットを走行させ1台で多工程処理が可能
② 2m定尺ユニット化により組立やライン延長が容易
③ 独自のつなぎ方式でユニット間乗り継ぎがスムーズ
④ 非接触給電・充電を採用
⑤ AGVと比較して優れた高速性・安定性
などを強調していた。
直線走行なのでレイアウト変更では少し自由度がないかもしれない。 AGVは無軌道方式でAIを搭載するとコンベアラインを最小限にレイアウトできることから、セル生産との住み分けとなると思われる。 生産ライン構築時に検討する必要性があるが、現状の直線ラインの置き替えであればメリットはある。
【スマート工場EXPO展】
食品・飲料工場向けに利用可能なソリューションで注目したものを中心にレポートする。
1.アキュイティー株式会社 https://www.acuity-inc.co.jp/
食品分野で利用可能な「加工作業ナビゲーションシステム」や「検査工程省人化支援システム」に注目した。
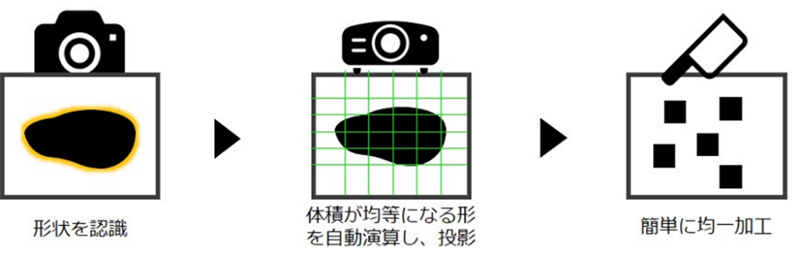
加工作業ナビゲーションシステム(図2.)は、個々に形状の異なる対象物の体積を自動で算出、均一な重量になるよう加工箇所をプロジェクターで対象に投影するナビゲーションシステムである。投影されたナビに沿って作業するだけで熟練者や新人問わずに均一の加工を実現できる。そのため属人化の解消や加工ミス防止によるコスト削減にメリットがある。
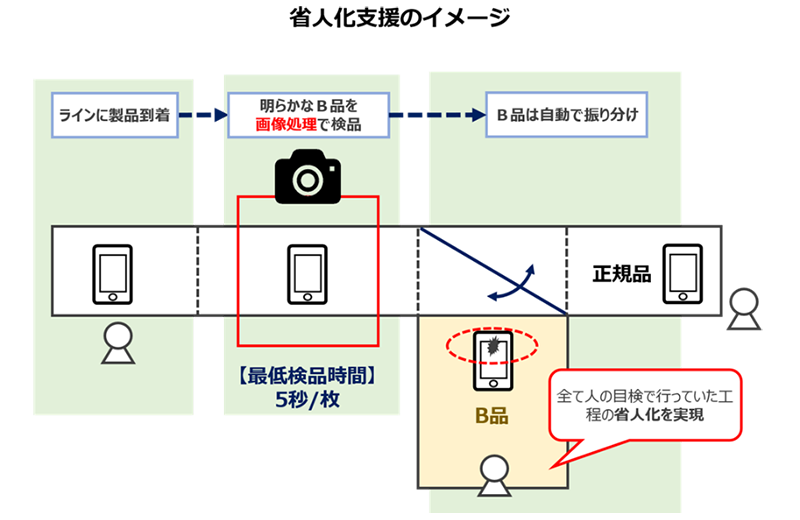
検査工程省人化支援システム(図3.)は、製品の検査や検品等の工程で不良個所を自動的に検知・可視化し、効率化を支援するシステムである。その場でOK/NGを判定し、NG品のみを目視で確認など工数を大幅に削減することができる。特に人手不足に悩む現場における業務効率化や人件費高騰に対する採算性の改善にメリットがある。
2.有限会社創造デザイン https://sozodg.com/
ITによる技術伝承や遠隔支援ソリューションを手がけている。今回注目した技術は遠隔地への作業支援を行うソリューションである。
「遠隔地現場リアルタイム技術支援ソフト」は、現場作業者と熟練者をインターネットでつなぎ作業の指示をリアルタイムで行えるソリューションで支援例を図⒋に示す。
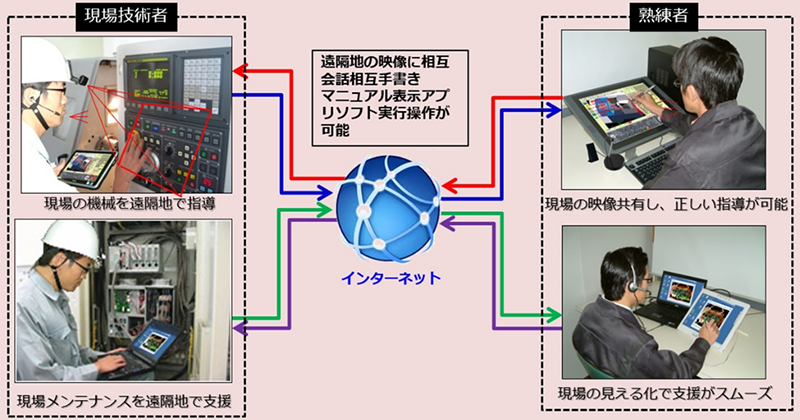
「技能伝承・映像電子マニュアル作成ソフト」は、熟練者のノウハウなどを若手人材に伝承するシステムとして映像などを駆使している行う支援ソフトが紹介されていました。
3.YE DIGITAL https://www.ye-digital.com/
(共同出展:株式会社安川電機)
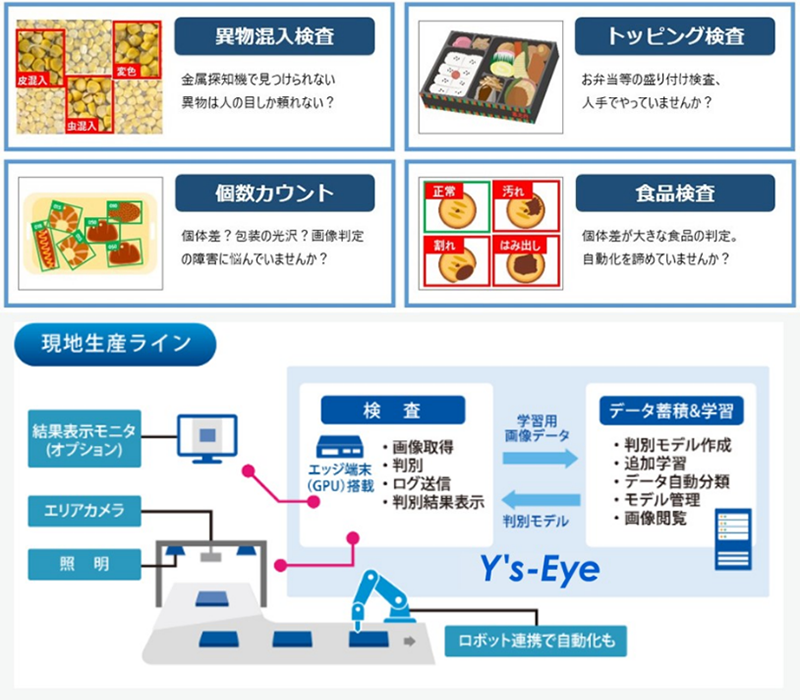
食品分野で利用可能な「Y’s-Eye」は、生産性向上/属人化解消を支援するAI画像判定サービス(図5.)である。
数値によって定義できない画像判定をAIがルール化し、リアルタイムに判定する。
AIや画像処理の専門知識も不要で手間を掛けずに目視検査工程を自動化でき、検査の効率化・品質平準化を図ることができる。
4.住友重機械工業株式会社 https://www.shi.co.jp/
人協働ロボットsawyerを使った自動車エンジンの部品組立のデモ展示を行っていた。
従来型の産業用ロボットとは違い、人を手伝う自由度の高い7軸の多関節を持つ協働ロボット(写真13.)に注目した。

次のような特徴を持っている。
- ① ダイレクトティーチング
- 人がアームを直接動かし、作業ポイントを示すだけで作業を学習する。
- ② 高速化・高精度化
- 外部カメラとの連動により迅速に物体を認識し、スピーディかつ高精度に稼働できる。
- ③ プログラミングが容易
- プログラミング言語を使わず、複雑な作動もGoogle Chrome画面で設定可能である。
- ④ 運用状況を可視化
- Sawyerの稼働速度やサイクル回数などを表示し、作業効率計測や予防保全に役立つ情報をリアルタイムに入手でき、次世代型のスマート化協働ロボットといえる。
5.株式会社ダイフク https://www.daifuku.com/
走行中に充電できる「走行中充電システムHID-PAD」(写真14.)のデモ走行を実演していた。従来は充電のためにわざわざ止まっていたが、走行しながら充電を行えるシステムとして紹介していた。

原理は、HIDインバータから高周波電流を誘導線に流し、電磁誘導作用で誘導線に接触することなく受電パッドに電力を受け渡し、その電力を給電用や充電用に使用するものである。
また、天井走行型のピックアップ装置をもった部品箱仕分け専用のシステムSPDRの紹介もしていた。
6.伊東電機株式会社 http://www.itohdenki.co.jp/
垂直型仕分け搬送とIoT順立てコンベヤを組み合わせたモジュールプラットフォーム「VSS+id-PAC」(写真15.)のデモ展示をしていた。機能別のモジュールを自由自在につなぎ合わせることで、ライン構築が容易になっている。

次の5つがポイントになる。
- ① 機能別にモジュール化
- 伊東電機オリジナルの直流駆動パワーモーラ(MDR)に付加価値を付けて「運ぶ」「仕分ける」「揚げる」をモジュール化している。
- ② ソフトとハードを融合
- id-PACは、モジュール毎の動作に必要な制御ロジックをバグ取りした状態で、プリインストールしている。家電製品のように並べてつなぐだけでの画期的なコンベアモジュールである。
- ③ ソフトの部品化
- 制御付モジュールなので専門の技術者によるプログラミングが不要である。
- ④ 自己診断機能
- 負荷具合(電流値や起動停止頻度など)を加味した稼働時間を積算するライフカウンタを搭載することで、計画的なメンテナンスを実施し、ライン停止のダウンタイムを最小限にすることができる。
- ⑤ フレキシブル
- 従来のコンベアは、重厚長大な機械装置をPLCで集中制御しているため、ライン変更や追加といった変化に弱いが、このシステムはフレキシブル性を兼ね備えている。
【所見】
昨年12月の国際ロボット展に引き続きロボデックス展とスマート工場EXPO展を視察した。全体的には、ロボット周辺の要素技術であるロボットハンド、ロボット支援装置・機器とAIやIoT関連の出展メーカーを中心に視察したが、新製品などは少なかったように感じた。ロボット本体については、技術的にどのメーカーも差がない。問題となるのは、ロボットハンドになる。一般産業用途では、特に問題にならないようなものでも食品や飲料、あるいは医薬品、化粧品など三品産業向けに使うためには、衛生面と安全面の課題解決が必要なことから製造ラインへの導入には、もう少し時間が掛かりそうである。
比較的物流や搬送についてはAGVに代表されるように作業工程間のムダ排除に向けたスマート化が進んでいる。スマート化に向けたキーテーマは、AIとIoTを加味した5Gによる遠隔支援システム、搬送装置のロボット化、検品工程のロボット化、知覚機能を持ったロボットハンドと視覚機能の3Dカメラを組み込んだ人協調ロボットなどになると考える。
今年6月に大阪で開催される国際食品工業展(FOOMA JAPAN 2020)で食品工場向けの人材不足解消、生産性アップに向けた新たな新商品、新システムが見られることを期待したい。
【引用・出典先】
説明図は各メーカーH.P、写真は各社カタログおよび展示会場撮影を掲載
以上